Most mechanical drives have a limited variable-speed range because they
cannot produce a zero or near-zero output speed. Those that include zero speed in their range are said to have an infinite
variable-speed range. Nevertheless, they all produce an infinite variety of speeds.
Generally, the outputs are irreversible; if reversibility is required,
the direction of input rotation must he changed. Because drive motors are directly coupled to the input shafts of the drive,
split arrangements thai permit the mechanical separation of the motor from the adjustable output speed unit are not possible.
Mechanical drives have been grouped in nine major classes, based on their operating
principle:
1) Cone drives
2) Disk drives
3) Ring drives
4) Spherical drives
5) Multiple-disk drives
6) Impulse drives
7) Controlled-differential drives
8) Belt drives
9) Chain drives
Many of the drives are available as commercial units; they can be obtained
in specific sizes and horsepowers from one or more manufacturers. Some drives are not available commercially and must be custom
designed.
The horsepower requirements of the application are determined by the basic equation
hp= Tn/63,000
where T = torque, in.-lb; n = speed, rpm.
The drive must also be matched to the torque requirements of the application.
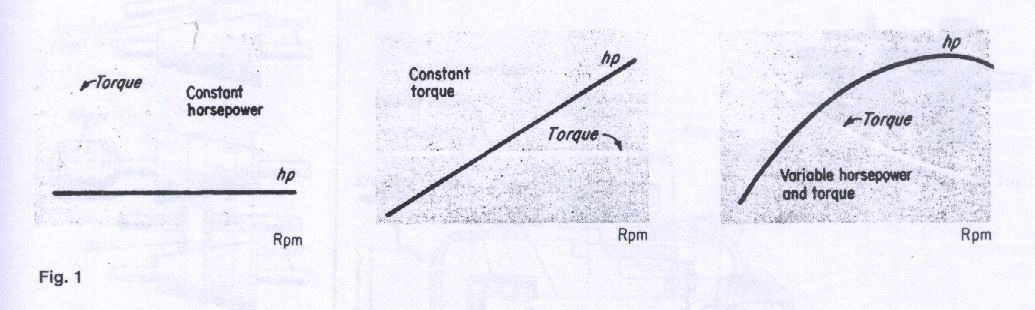
The three basic types of horsepower-torque characteristics of variable-speed drives are illustrated in Fig. 1:
Constant horsepower
application. The torque decreases almost hyperboli-cally with increase in speed. This requirement is frequently found . in
machine tools, particularly on spindle drives. The critical condition here is at minimum speed when the torque and the stress
of the mechanical parts are at a maximum.
Constant torque application. The horsepower requirements increase proportionally to
speed, as is the case with many conveyors, reciprocating compressors, printing presses, and machine-tool feed drives,
or where the load is almost a pure friction load. The selection of the drive should be based on the power requirement at maximum
speed.
Variable horsepower and
speed. This requirement is common with propellers and centrifugal pumps. The critical condition is at maximum speed.
The power delivered at low speed is usually more than is needed.
Only stepless drives are described here. Most of the drives have medium capacity; however,
some are limited to 5 hp or less. All are over 1 hp except the impulse drives.
All drives, with the exception of the PIV drive, are based on the friction principle.
Therefore, a certain amount of slip, which increases with torque, can be expected. Slippage serves as a safety device to prevent
damage from overload. But high slippage is undesirable because it decreases speed regulation, efficiency, and life of
the system. All drives except the belt-driven units operate in an oil bath or mist.